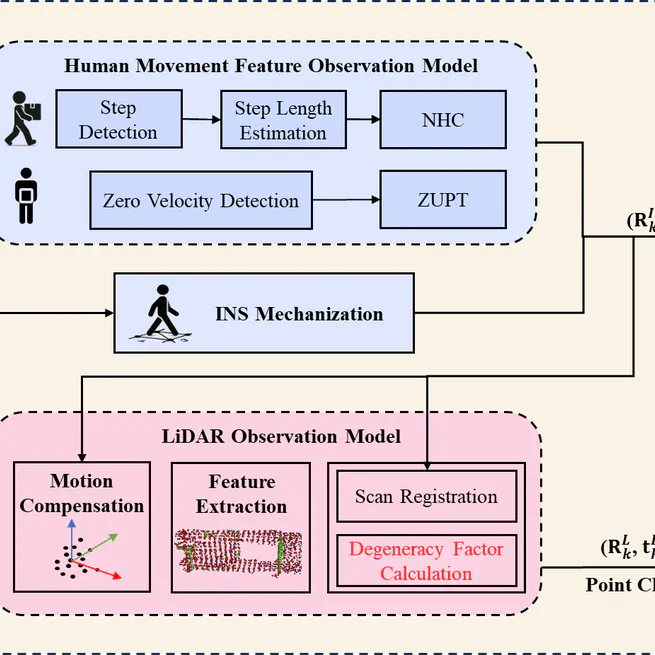
Pedestrian Gait-Enhanced LINS: A Robust, IMU-Centric LiDAR-Inertial Navigation System for Pedestrian
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software. Create your slides in Markdown - click the Slides button to check out the example. Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.
Apr 1, 2025
A Real-Time Degeneracy Sensing and Compensation Method for Enhanced LiDAR SLAM
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software. Create your slides in Markdown - click the Slides button to check out the example. Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.
Apr 1, 2025
EVLINS: Strong Robust Navigation System Based on Event Camera
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software. Create your slides in Markdown - click the Slides button to check out the example. Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.
Feb 1, 2025
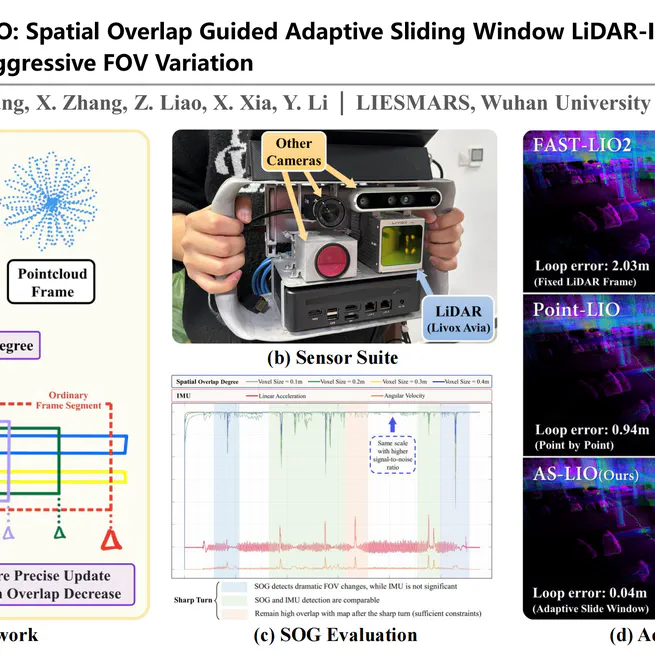
AS-LIO: Spatial Overlap Guided Adaptive Sliding Window LiDAR-Inertial Odometry for Aggressive FOV Variation
🔸AS-LIO is the **first** framework that evaluates pointcloud's **Spatial Overlap Degree** (SOD) to perceive FOV variation and adaptively **adjusts the frequency** for challenging motion scenario.
Oct 17, 2024
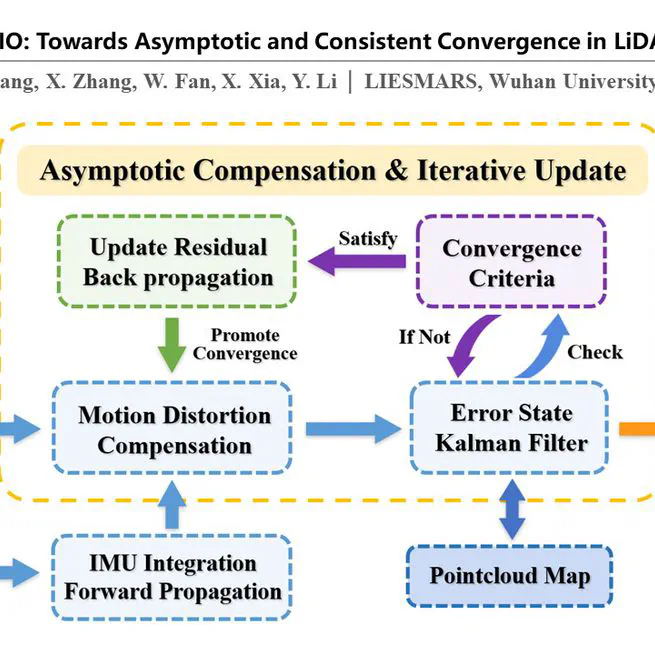
AC-LIO: Towards Asymptotic Compensation for Distortion in LiDAR-Inertial Odometry via Selective Intra-Frame Smoothing
🔸The **asymptotic compensation** is used to promote **consistent convergence** during Iterative ESKF. 🔸A **convergence criteria** from point-plane residuals is to control **backpropagation**.
Oct 16, 2024
Strong Robust LIO System Based on Event Camera Assistance
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software. Create your slides in Markdown - click the Slides button to check out the example. Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.
Oct 1, 2024
Multi-level localization trajectory alignment and repairing in complex environment
Click the Cite button above to demo the feature to enable visitors to import publication metadata into their reference management software. Create your slides in Markdown - click the Slides button to check out the example. Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.
May 1, 2024