AS-LIO: Spatial Overlap Guided Adaptive Sliding Window LiDAR-Inertial Odometry for Aggressive FOV Variation
Tianxiang Zhang
1
Xuanxuan Zhang
1
Zongbo Liao
1
Xin Xia
2
You Li
1
,*
1 Wuhan University
,
2 University of Michigan-Dearborn
(
* : Corresponding Author
)
Abstract
🔸LiDAR-Inertial Odometry (LIO) demonstrates outstanding accuracy and stability in general low-speed and smooth motion scenarios. However, in high-speed and intense motion scenarios, such as sharp turns, two primary challenges arise: firstly, due to the limitations of IMU frequency, the error in estimating significantly non-linear motion states escalates; secondly, drastic changes in the Field of View (FOV) may diminish the spatial overlap between LiDAR frame and pointcloud map (or between frames), leading to insufficient data association and constraint degradation.
🔸To address these issues, we propose a novel Adaptive Sliding window LIO framework (AS-LIO) guided by the Spatial Overlap Degree (SOD). Initially, we assess the SOD between the LiDAR frames and the registered map, directly evaluating the adverse impact of current FOV variation on pointcloud alignment. Subsequently, we design an adaptive sliding window to manage the continuous LiDAR stream and control state updates, dynamically adjusting the update step according to the SOD. This strategy enables our odometry to adaptively adopt higher update frequency to precisely characterize trajectory during aggressive FOV variation, thus effectively reducing the non-linear error in positioning. Meanwhile, the historical constraints within the sliding window reinforce the frame-to-map data association, ensuring the robustness of state estimation.
🔸Experiments show that our AS-LIO framework can quickly perceive and respond to challenging FOV change, outperforming other state-of-the-art LIO frameworks in terms of accuracy and robustness.
🔸To address these issues, we propose a novel Adaptive Sliding window LIO framework (AS-LIO) guided by the Spatial Overlap Degree (SOD). Initially, we assess the SOD between the LiDAR frames and the registered map, directly evaluating the adverse impact of current FOV variation on pointcloud alignment. Subsequently, we design an adaptive sliding window to manage the continuous LiDAR stream and control state updates, dynamically adjusting the update step according to the SOD. This strategy enables our odometry to adaptively adopt higher update frequency to precisely characterize trajectory during aggressive FOV variation, thus effectively reducing the non-linear error in positioning. Meanwhile, the historical constraints within the sliding window reinforce the frame-to-map data association, ensuring the robustness of state estimation.
🔸Experiments show that our AS-LIO framework can quickly perceive and respond to challenging FOV change, outperforming other state-of-the-art LIO frameworks in terms of accuracy and robustness.
(I) Odometry Accuracy Evaluation
(II) Principal Comparison
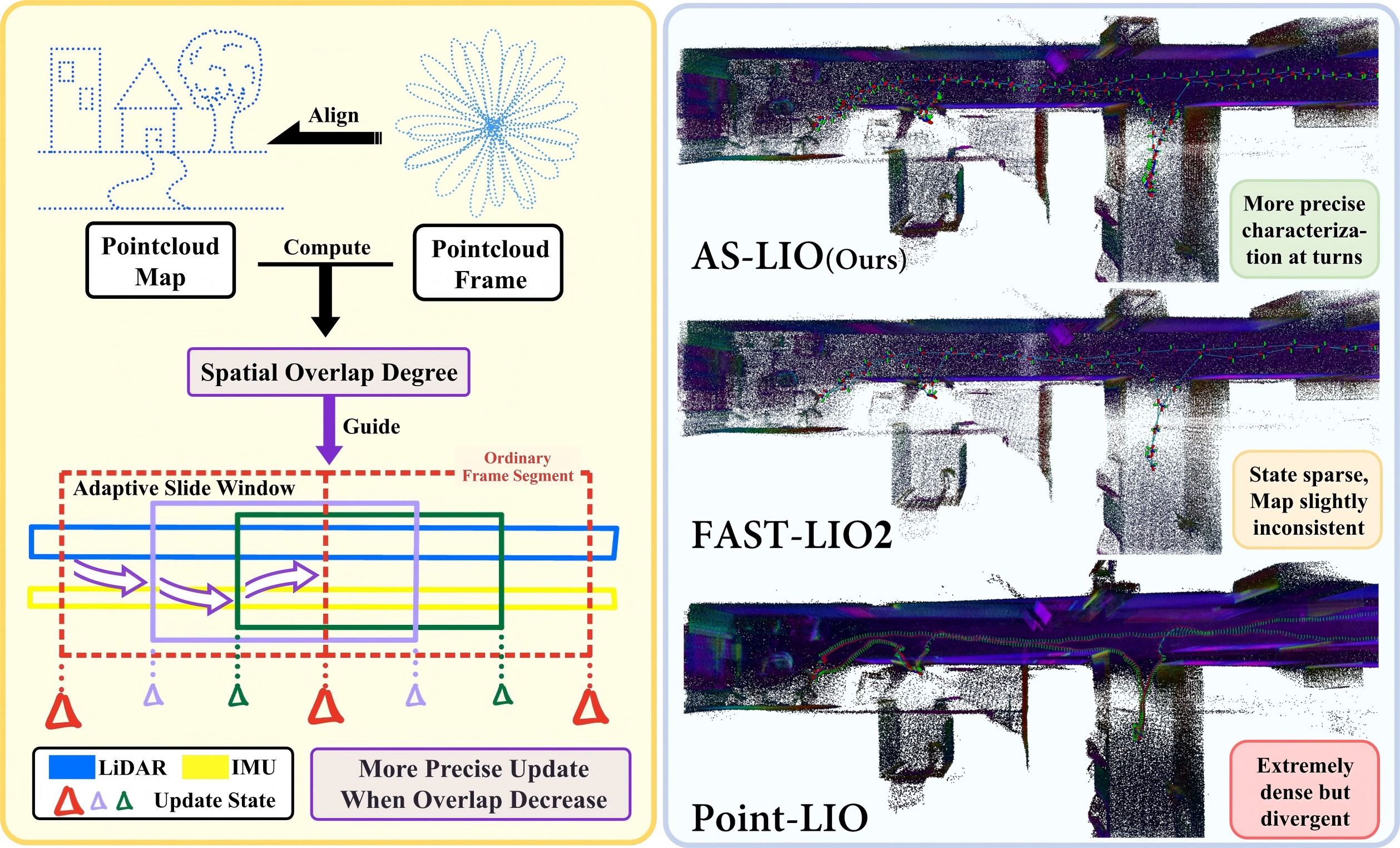
🔸Our AS-LIO framework (Left) and result comparision (Right). We utilize the frame-to-map spatial overlap degree to assess the impact of FOV change on pointcloud alignment, then accordingly adjust the update step of the sliding window and maintain the history constraints.
(III) System Overview
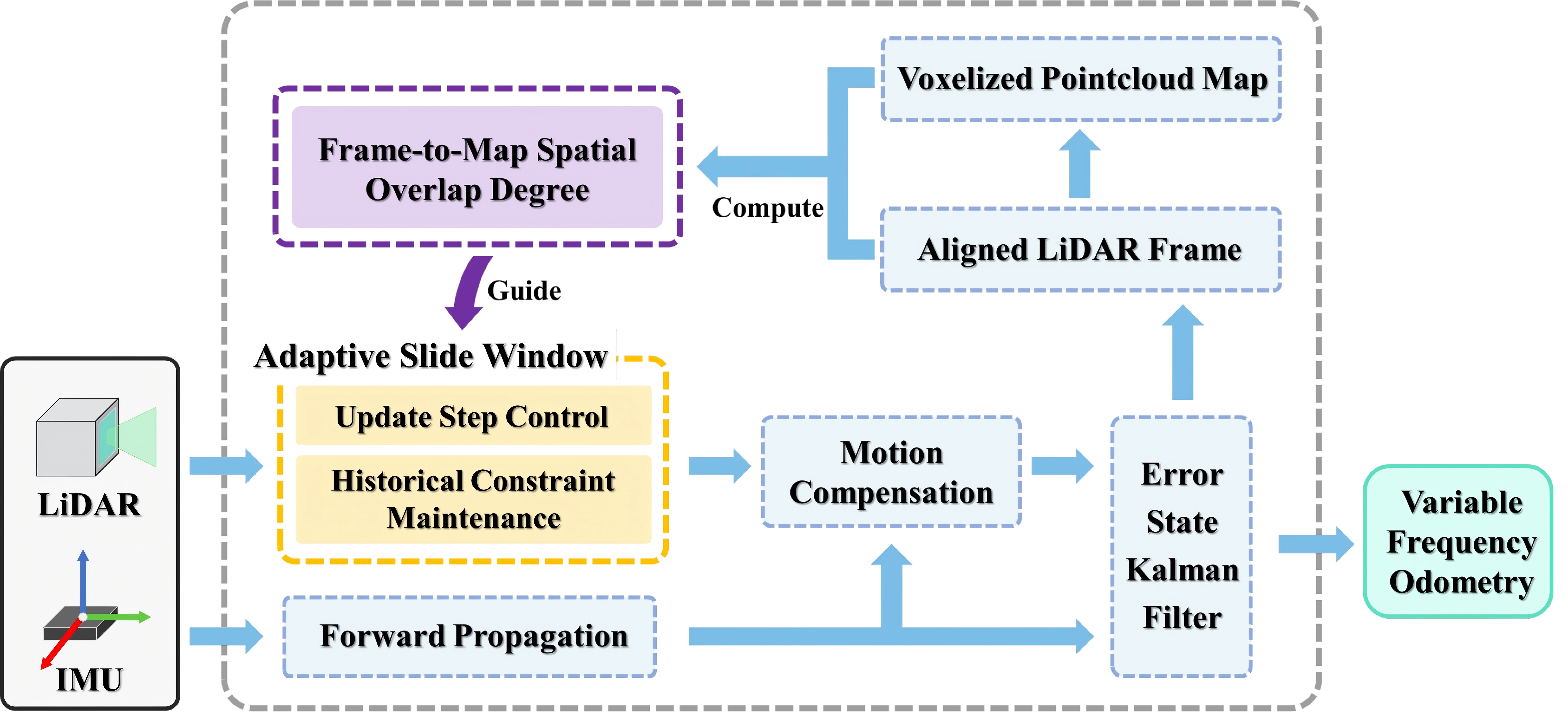
The continuous LiDAR input stream is fed into adaptive sliding window module to extract the pointcloud frame containing the latest and historical observations based on the update step. Then the pointcloud frame is compensated by IMU and fed into the ESKF to obtain dynamic frequency odometry output (from 10 Hz to 125 Hz). The aligned LiDAR frame is first projected to the 3D voxelized pointcloud map, to compute the frame-to-map SOD, after that merging with the pointcloud map. The SOD, reflecting the impact of FOV change on pointcloud alignment, is then used to guide the update step control in the sliding window for the next update.
(IV) Spatial Overlap Degree Evaluation
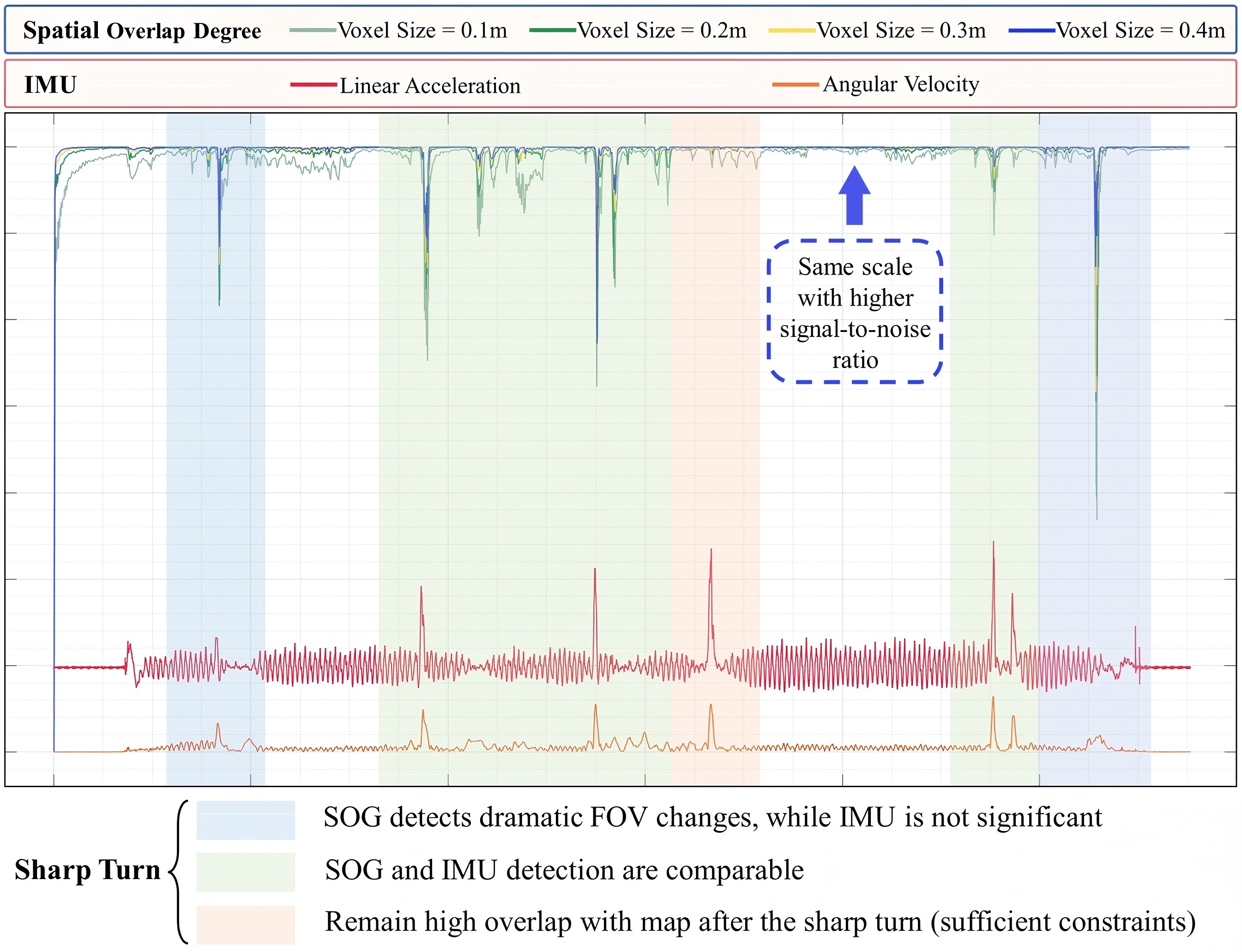
🔸We conduct a sensitivity analysis on the SOD computation, indicating SOD is stable for different voxel size (within reasonable ranges). We also compare IMU data within the same period, indicating SOD with a higher signal-to-noise ratio can significantly identify when FOV change weaken pointcloud constraints.