About Me
Tianxiang Zhang is a 2nd-year Master student in State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing (LIESMARS), Wuhan University, and currently a visiting student in School of Electrical and Electronic Engineering, Nanyang Technological University. I obtained Bachelor of Engineering in Electronic Information School of Wuhan University with the honour of Outstanding Graduate.
My research interests include Multi-Sensor SLAM, 3D Reconstruction, Robotics. During my first year of M.S. program, I’ve contributed two research works as first author: one has been accepted as oral presentation by IROS 2024, and the other is currently under review, both supervised by Prof. You Li.
I was also awarded the National 1st Prize of Intel Cup Undergraduate Electronic Design Contest, and designated as Outstanding Winner and AMS Award of the Interdisciplinary Contest in Modeling(ICM) both in 2022.
- Multi-Sensor SLAM
- 3D Reconstruction
- Robotics
Visiting Student
School of EEE, NTU
M.S. in Computer Application Technology
LIESMARS LAB, WHU
B.S. in Electronic Engineering
School of EE, WHU
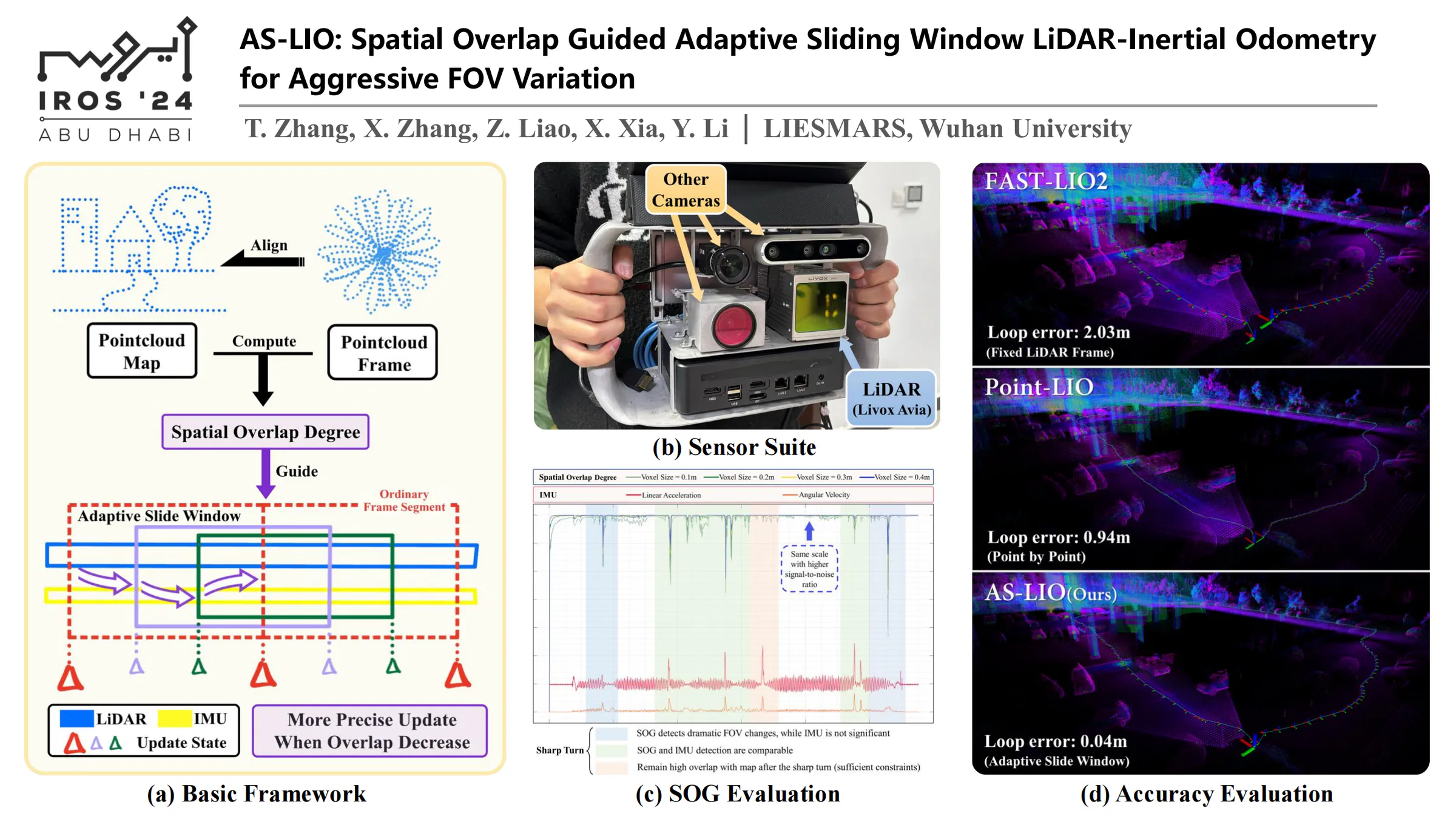
AS-LIO: Spatial Overlap Guided Adaptive Sliding Window LiDAR-Inertial Odometry for Aggressive FOV Variation
🦾 IROS 2024 · Oral Presentation
🔸AS-LIO is the first framework that evaluates pointcloud’s Spatial Overlap Degree (SOD) to perceive FOV variation and adaptively adjusts the frequency for challenging motion scenario.
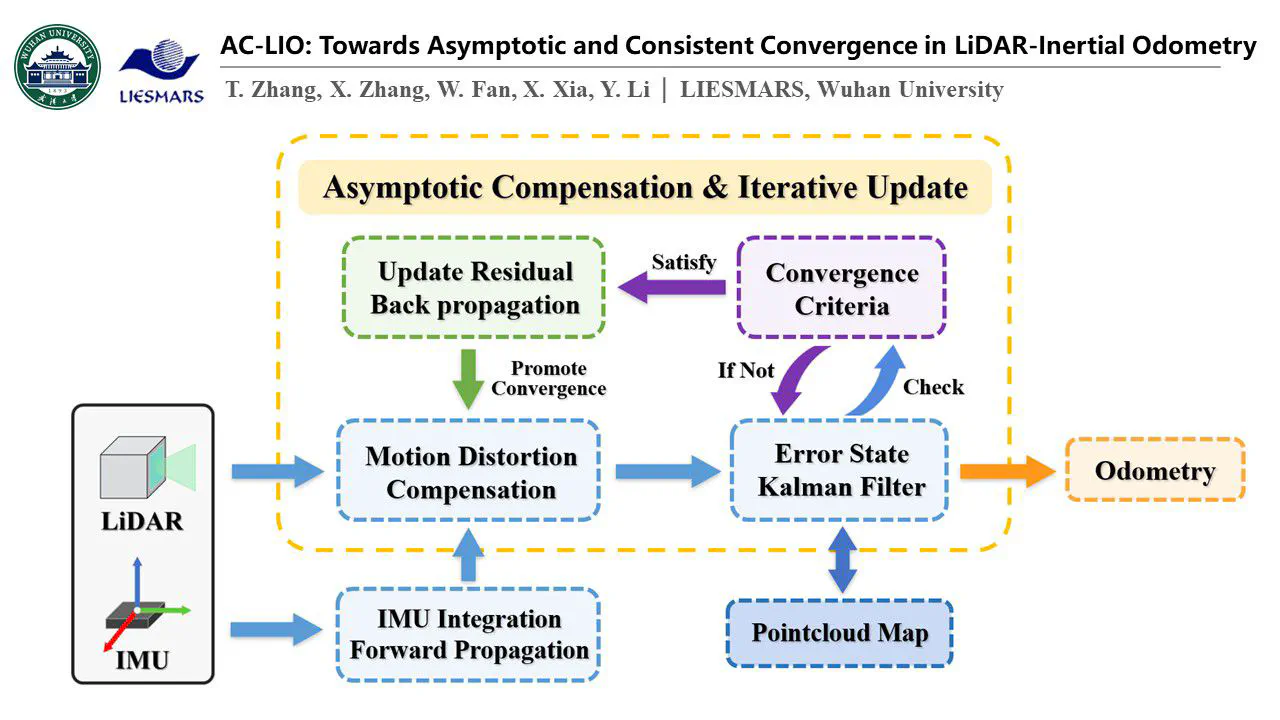
AC-LIO: Towards Asymptotic Compensation for Distortion in LiDAR-Inertial Odometry via Selective Intra-Frame Smoothing
🔸The asymptotic compensation is used to promote consistent convergence during Iterative ESKF.
🔸A convergence criteria from point-plane residuals is to control backpropagation.
The 2nd Chinese Association of Automation Postgraduate Academic Symposium
🏆 Best Poster Award
Outstanding Graduate Student
🎓 Top 10% in total graduates
Future Star of Electronic Information School(EIS)
🎓 Only 10 selected annually in EIS
Innova Award for Undergraduate Innovation Achievement
🎓 Only 17 selected annually in campus
Liu Daoyu Presidential Scholarship
🎓 Only 36 selected annually in campus
Intern
Autopilot Algorithm Engineer
Research Institute, MEGVII Technology (Shanghai)Automated Valet Parking (AVP):
- Responsible for the localization and perception modules for vehicles in AVP scenarios. Fusing fisheye cameras, wheel odometry and IMU to enable real-time, high-precision positioning for safe AVP.
Education
Visiting Student
School of EEE, NTU- Visiting Project: Bio-inspired 3D Spatial Perception and Localization
- Combine omnidirectional perception and LiDAR-based SLAM to design an active/interactive SLAM system with autonomous evaluation on visual constraint integrity for a smarter 3D Reconstruction.
M.S. in Computer Application Technology
LIESMARS LAB, WHU- Supervisor: Prof. You Li
- Research interests: Multi-Sensor SLAM, 3D Reconstruction, Robotics
B.S. in Electronic Engineering
School of EE, WHUGPA: 3.9/4.0 (Top 10% in program)
- Specialization: Electronic Information Engineering
- Courses included: Signal & System, Robotics, Artificial intelligence, Embedded System, Image Analysis, etc.